|
I am a first-year research-based master student (MEng) at Nanyang Technological University, advised by Prof. Ziwei Wang as part of the Pine Lab. I received my Bachelor of Engineering degree from Southwest University in June 2025. During my undergraduate studies, I was also a visiting student at Westlake University, advised by Prof. Donglin Wang. Email / Google Scholar / GitHub / Twitter / LinkedIn |

|
|
|
My research interests are primarily focused on Embodied Artificial Intelligence and Computer Vision. My research interests focus on how to achieve broad generalization capabilities for open-world manipulation tasks, the application of Vision-Language-Action models to robots, and inference acceleration. |
|
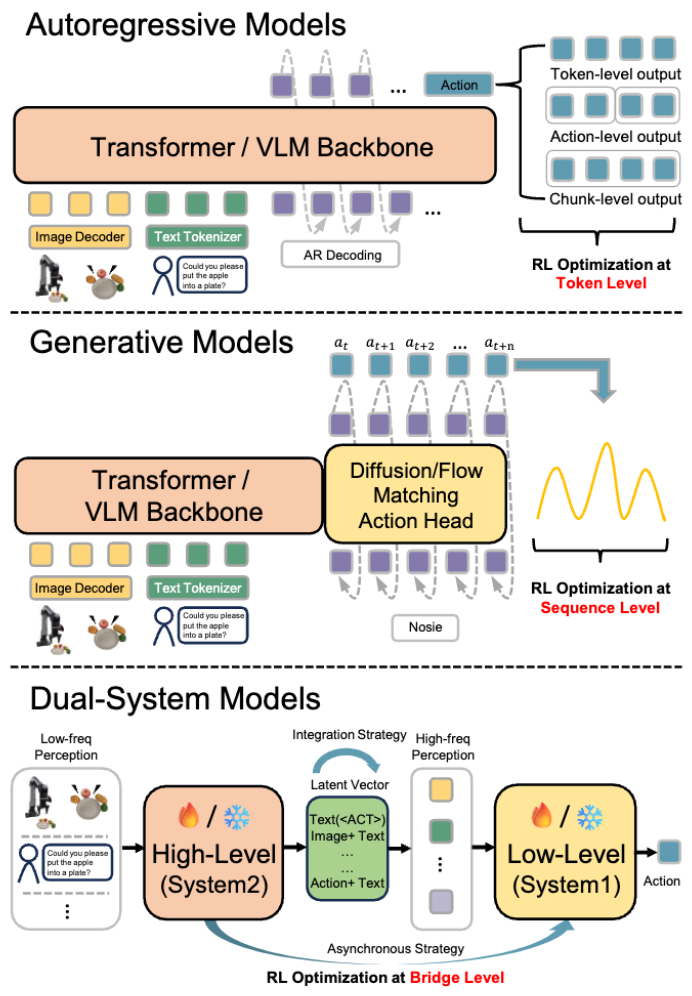
Haoyuan Deng, Zhenyu Wu, Haichao Liu, Wenkai Guo, Yuquan Xue, Ziyu Shan, Chuanrui Zhang, Bofang Jia, Yuan Ling, Guanxing Lu, and Ziwei Wang Github, 2025 [Project Page] [Paper] [Code] This survey takes an end-to-end from pretraining to real-world deployment perspective to systematically review RL-VLA architectures, training paradigms, real-world deployment frameworks, and evaluation benchmarks, showing how reinforcement learning overcomes the OOD generalization limits of purely imitation-trained VLAs and outlining paths toward general robotic systems. |
|
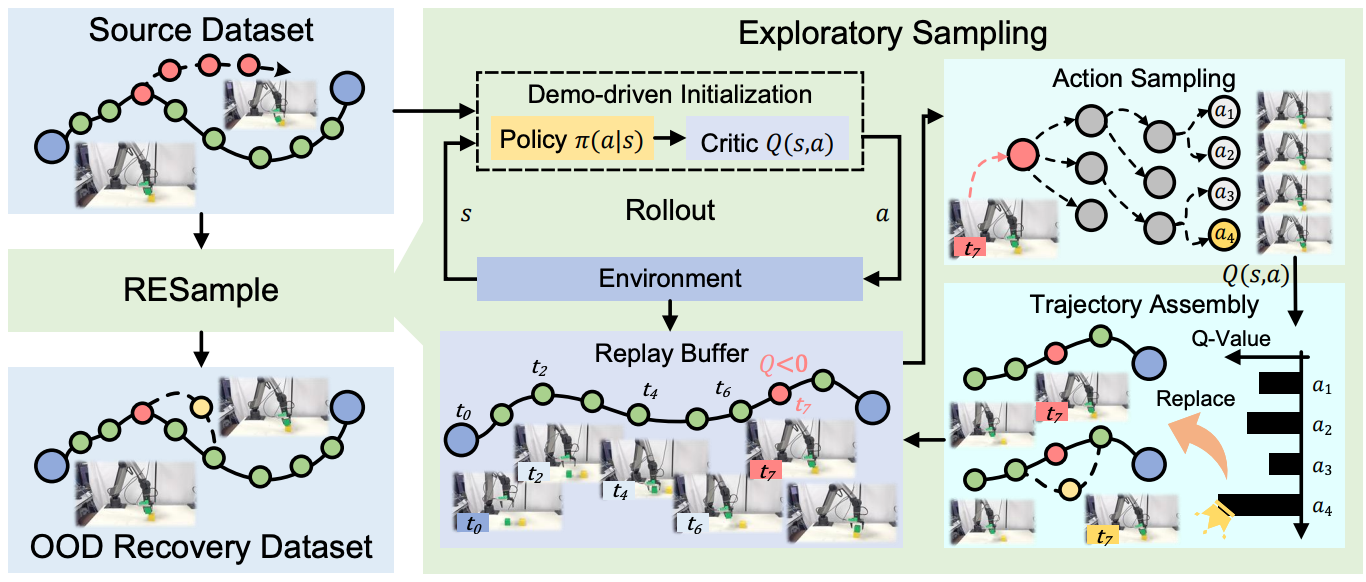
Yuquan Xue, Guanxing Lu, Zhenyu Wu, Chuanrui Zhang, Bofang Jia, Zhengyi Gu, Yansong Tang, Ziwei Wang arXiv, 2025 [Project Page] [Paper] [Code] RESample avoids collecting large amounts of new failure data and running expensive online RL by using an offline RL value network together with an exploratory sampling mechanism that automatically mines and generates OOD bottleneck states from existing demonstrations and rollouts, and then adds these error-prone, recovery-critical segments into the VLA imitation learning dataset so that the VLA learns to recover from OOD states. |
|
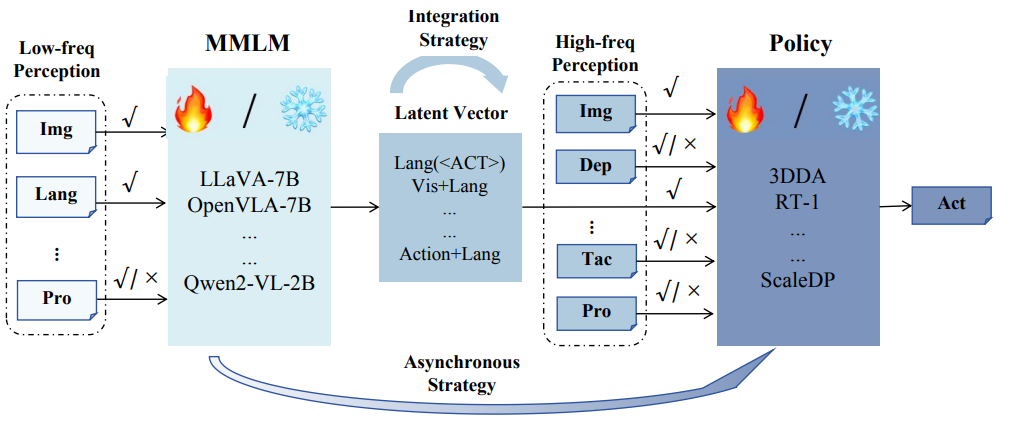
Can Cui, Pengxiang Ding, Wenxuan Song, Shuanghao Bai, Xinyang Tong, Zirui Ge, Runze Suo, Wanqi Zhou, Yang Liu, Bofang Jia, Hangyu Liu, Mingyang Sun, Han Zhao, Siteng Huang, Donglin Wang arXiv, 2025 [Project Page] [Paper] [Code] OpenHelix is a dual-system framework for robotics(VLA Model), which leverages the reasoning capabilities of high-level multimodal large language models (MLLMs) to enhance low-level policies with minimal training cost. This work first summarizes and compares the structural designs of existing dual-system architectures, and then conducts systematic empirical evaluations on their core design elements. Finally, we present a low-cost open-source model to support further research and applications. |

|
Bofang Jia, Pengxiang Ding, Can Cui, Mingyang Sun, Pengfang Qian, Siteng Huang, Zhaoxin Fan, Donglin Wang arXiv, 2024 [Project Page] [Paper] [Code] SDM Policy distills diffusion-based visuomotor policies into one-step generators via a two-stage process combining score and distribution matching. It uses a dual-teacher setup to enhance robustness and achieves 6 times faster inference. |
|
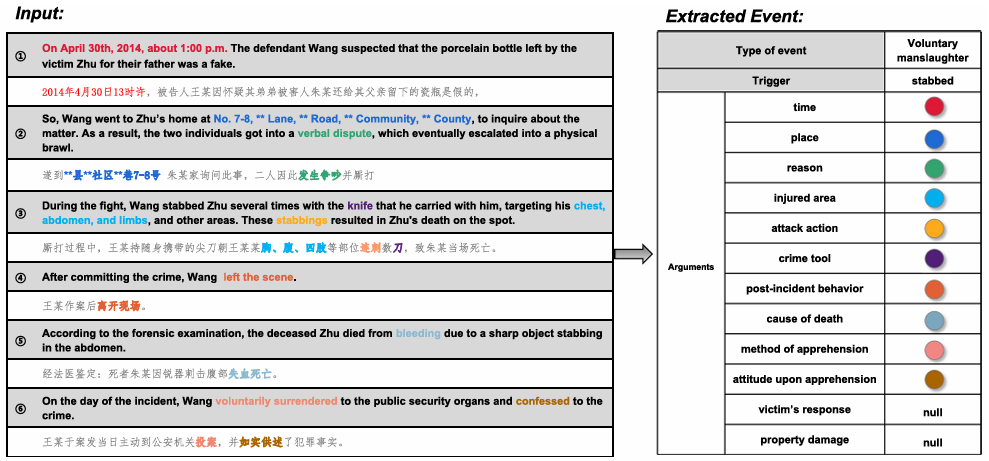
Guochuan Xian, Siyuan Du, Xi Tang, Yuan Shi, Bofang Jia, Banghao Tang, Zhefu Leng, Li Li Neural Computing and Applications (NCAA), 2024 [Project Page] [Paper] [Code] DLEE is a high-quality Chinese dataset for document-level legal event extraction, enabling training and evaluation of NLP models in complex legal reasoning contexts. |
|
|
I have some experience in designing and implementing robotic systems. Here are some of the robotic systems I have helped develop: [Link] |
|
|